|
11 |
過去記事の訂正 (2) |
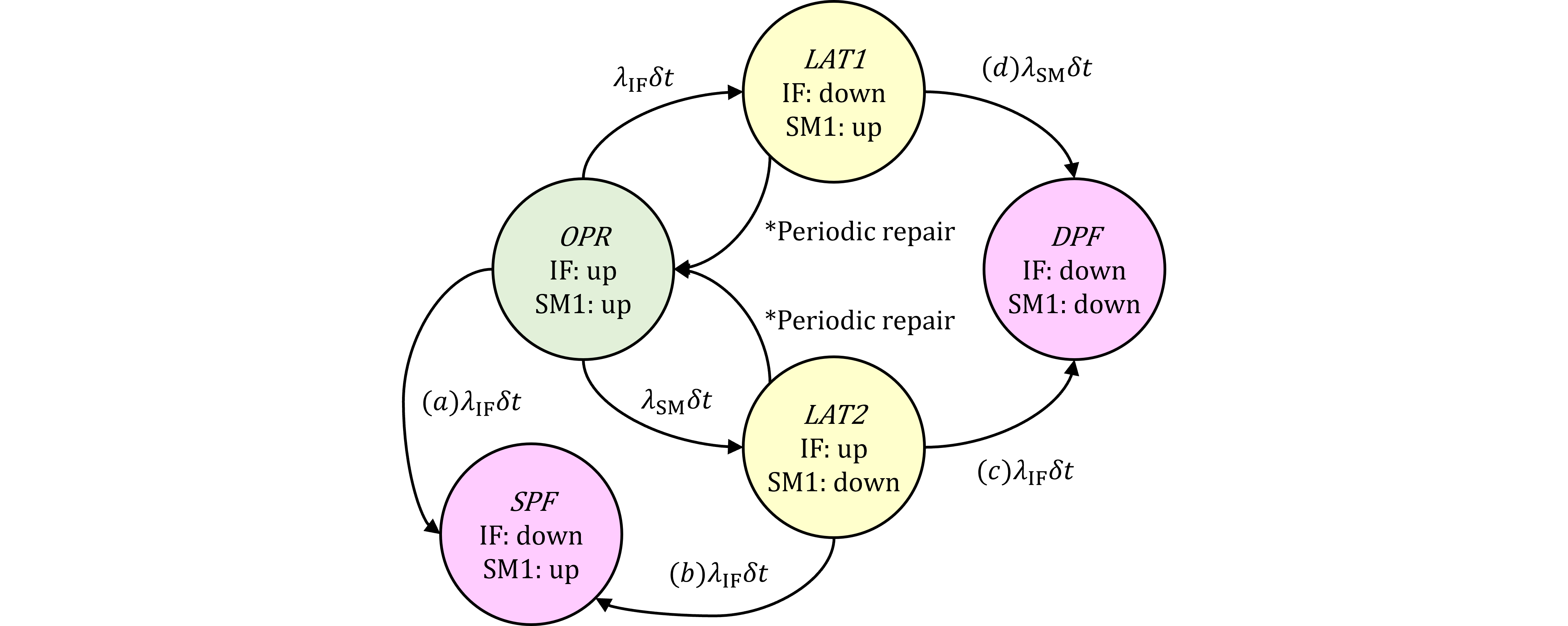
OPR⇒SPFの平均PUDの計算
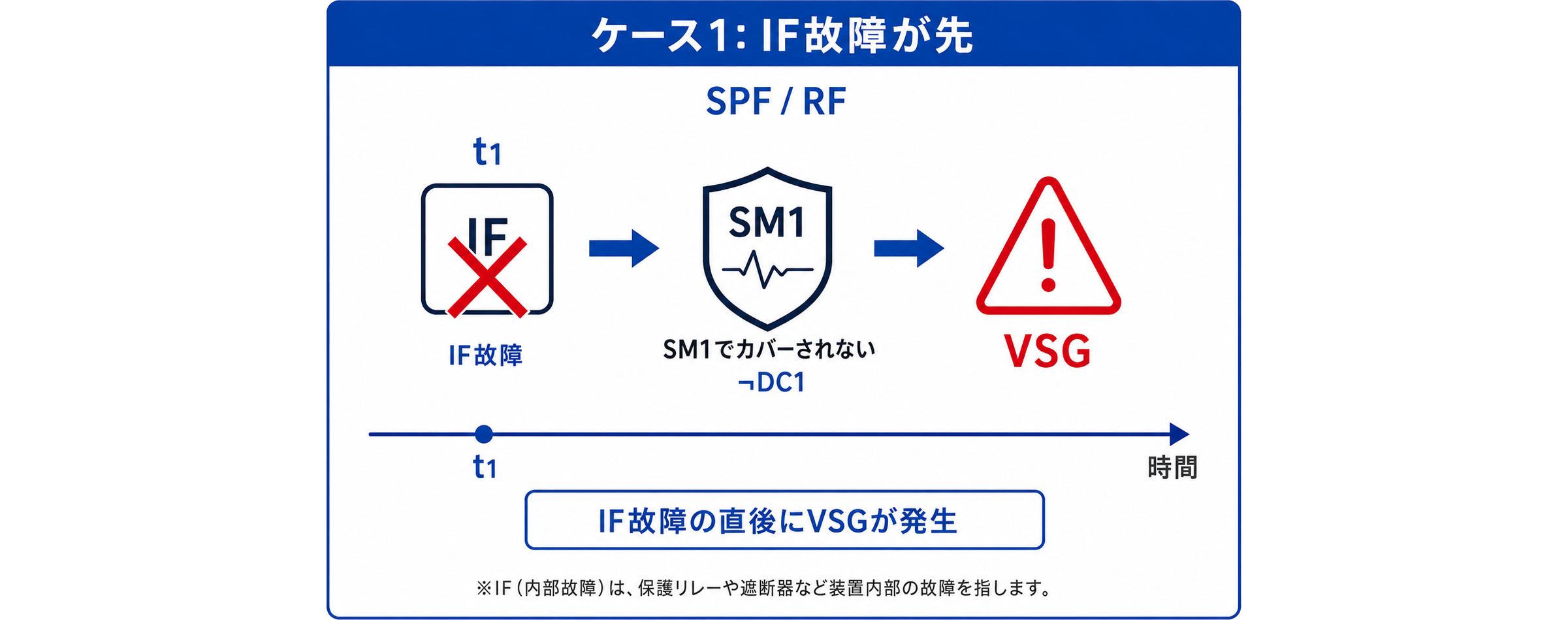
従来はMPF detectedをMPF latent扱いにしていたものを、non faultyに変更しました。そもそもMPFの意味はVSG preventableなIFのフォールト、すなわち1st SMによりVSGの抑止を受けたIFのフォールトであるため、SPFの計算に影響はありません。SPFは、IFのフォールトがnon preventable、すなわちVSG抑止不可の場合に起きるためです。
本稿では、旧記事における状態整理表は再掲せず、導出に必要な量のみを以下に定義します。ここで、周期検査間隔を$\tau$、車両寿命を$T_\text{lifetime}$とし、$u:=t\bmod\tau$とします。
OPRからSPFへの平均PUD(66.13)を計算します。
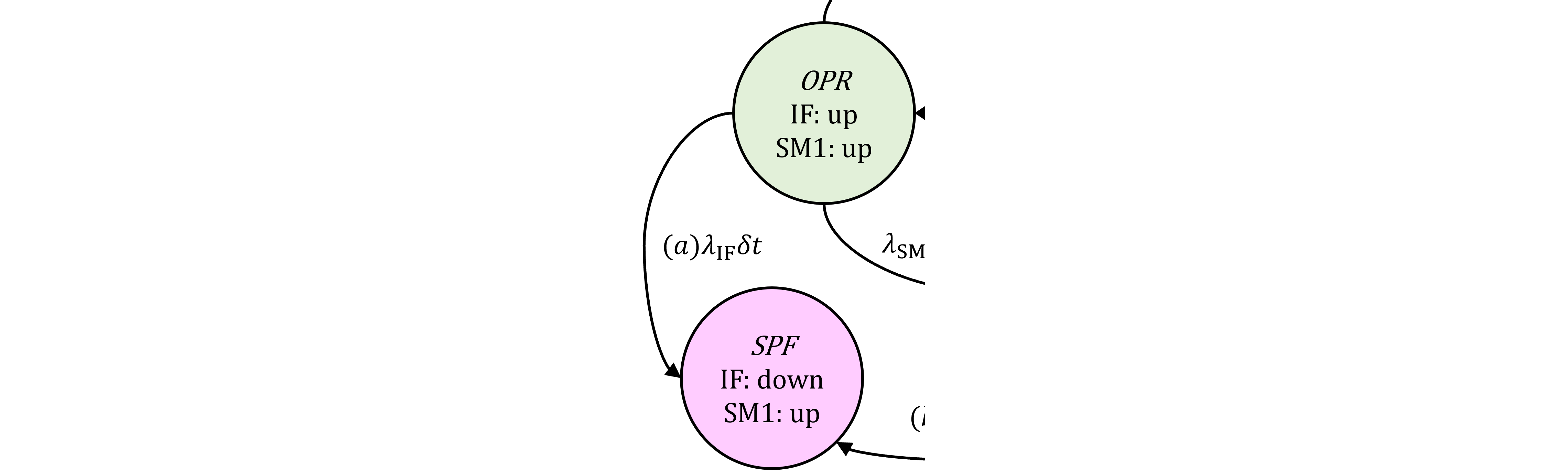
OPRからSPFへの平均PUDは、 $$ \begin{eqnarray} \overline{q_\text{SPF(a),IFU}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\text{SPF via (a) at }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{OPR}_{\overline{\text{prev}}}\text{ at }t\cap\text{IF down in }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\text{IF down in }(t, t+dt]\ |\ \text{OPR}_{\overline{\text{prev}}}\text{ at }t\}\\ & &\ \ \ \ \cdot\Pr\{\text{OPR}_{\overline{\text{prev}}}\text{ at }t\} \end{eqnarray} \tag{1086.1} $$
ここで、IF non preventableのup状態は、 $$ \Pr\{\text{IF}^{\text{U}}_{\overline{\text{prev}}}\text{ up at }t\}=(1-K_\text{IF,RF})R_\text{IF}(t)\tag{1086.2} $$ また、SMのup状態を、$A_\text{SM}(t):=(1-K_\text{SM,MPF})R_\text{SM}(t)+K_\text{SM,MPF}R_\text{SM}(u)$と定義すれば、 $$ \begin{eqnarray} \Pr\{\text{OPR}_{\overline{\text{prev}}}\text{ at }t\}&=&\Pr\{\text{IF}^{\text{U}}_{\overline{\text{prev}}}\text{ up at }t\cap\text{SM up at }t\}\\ &=&(1-K_\text{IF,RF})R_\text{IF}(t)A_\text{SM}(t) \end{eqnarray} \tag{1086.3} $$ となります。
一方、(1086.1)の右辺積分中の条件付き確率式は、 $$ \require{cancel} \begin{eqnarray} &&\hspace{-6em}\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{OPR}_{\overline{\text{prev}}}\text{ at }t\}\\ &=&\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{U}}_{\overline{\text{prev}}}\text{ up at }t\cap\bcancel{\text{SM up at }t}\}\\ &=&\Pr\{\text{IF}^{\text{U}}\text{ down in }(t, t+dt]\ |\ \text{IF}^{\text{U}}\text{ up at }t\}\\ &=&\lambda_\text{IF}dt \end{eqnarray} \tag{1086.4} $$ です。ここで途中式でSM関連の項を消している理由は、記事#103の(103.4)に因るものです。
よって平均PUDは、 $$ \overline{q_\text{SPF(a),IFU}}=\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}(1-K_\text{IF,RF})R_\text{IF}(t)A_\text{SM}(t)\lambda_\text{IF}dt \tag{1086.5} $$ となります。
ここで、$A_\text{SM}(t)=(1-K_\text{SM,MPF})R_\text{SM}(t)+K_\text{SM,MPF}R_\text{SM}(u)$であるため、(1086.5)は $$ \begin{eqnarray} (1086.5)&=&\frac{1-K_\text{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}R_\text{IF}(t)\left[(1-K_\text{SM,MPF})R_\text{SM}(t)+K_\text{SM,MPF}R_\text{SM}(u)\right]\lambda_\text{IF}dt\\ &\approx&(1-K_\text{IF,RF})\lambda_\text{IF}-\frac{1-K_\text{IF,RF}}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ &=&\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha},\\ & &\text{ただし、} \alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right] \end{eqnarray} \tag{1086.6} $$ です。
この導出では、SMがdownしている確率が$R_\text{SM}(t)$または$R_\text{SM}(u)$を通じて現れるため、2次の補正項として$\alpha$が現れます。一方で、SPF(a)そのものはIF non preventableの故障により生じるため、主項は従来どおり$(1-K_\text{IF,RF})\lambda_\text{IF}$です。